Cellular Automata
This research investigates the application of Cellular Automata to the conceptual design of structures.
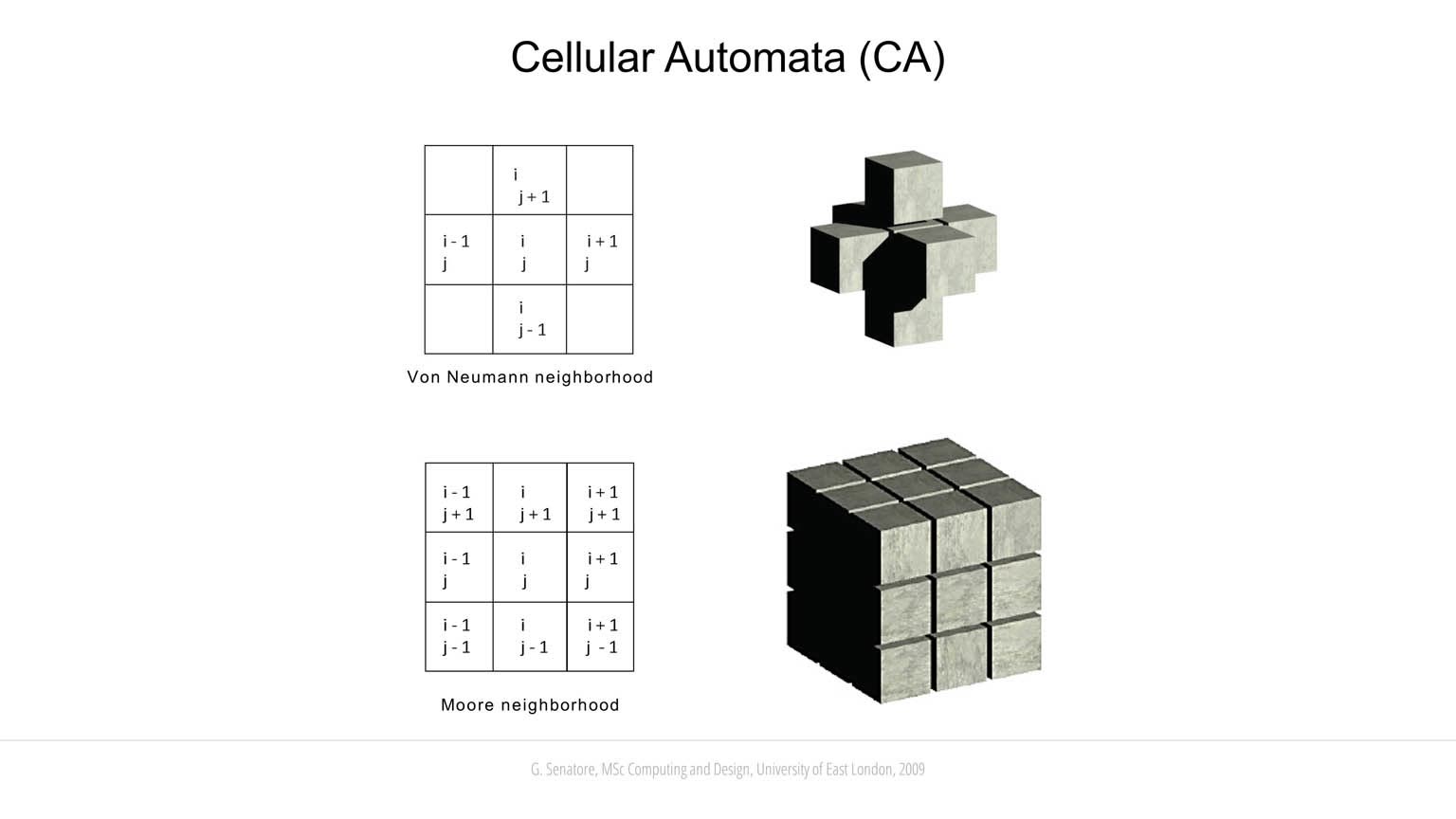
Cellular Automata (CA) are a discrete computational system based on cellular components whose state depends on their previous state and the state of their neighbors. CA perform complex behavior through simple rules that relate interconnect the states of the cellular components. CA are usually implemented through a grid in one, two or three dimensions. Each cell interacts with a neighborhood that comprises a finite number of other cells. The interaction rules are applied to each cell and propagate through the grid by means of local interaction between neighbors. First developed by Stanislaw Ulam and John von Neumann in the 1940s, CA have been investigated by many others among whom John Conway implemented the well-known Game of Life.
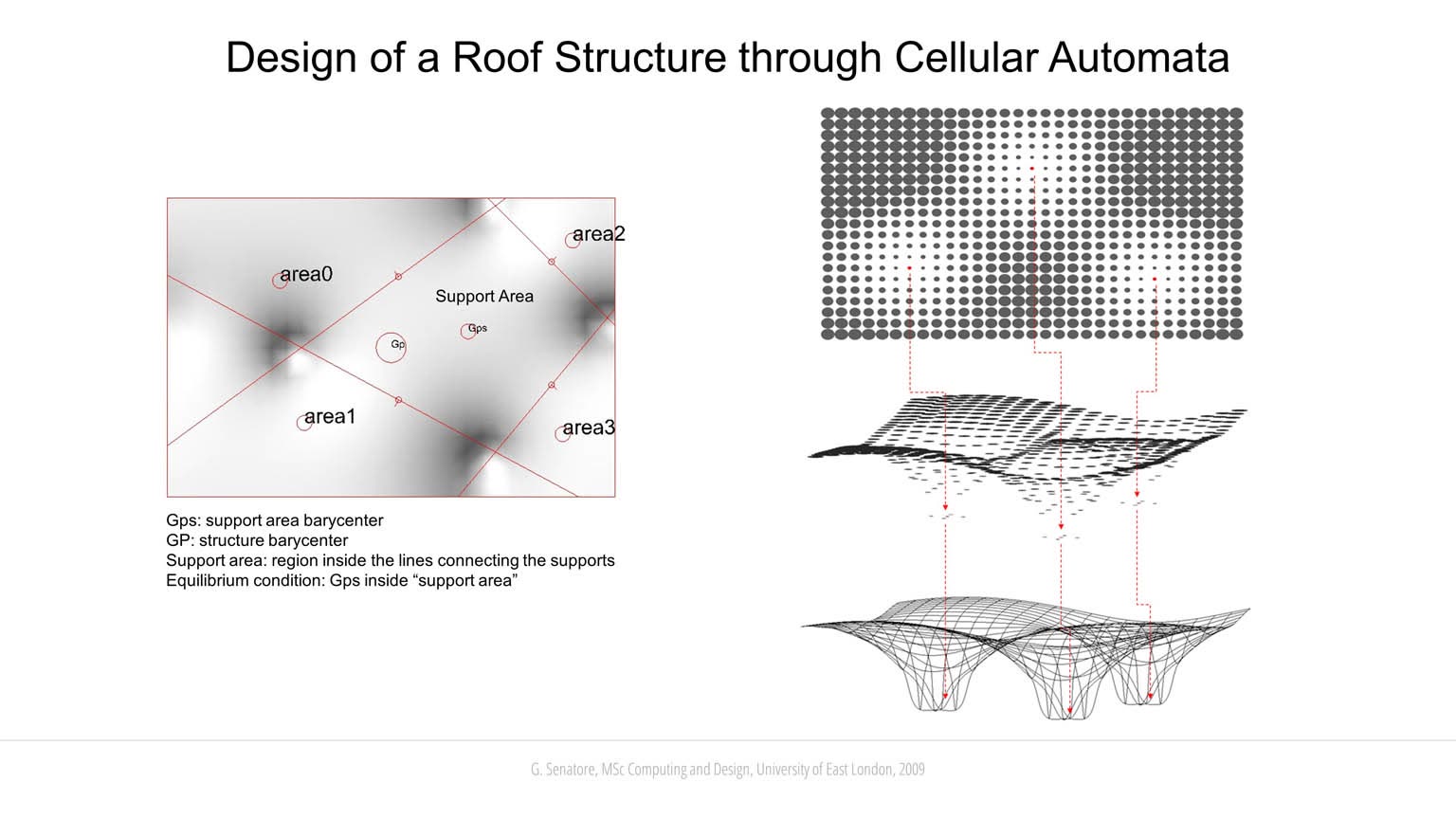
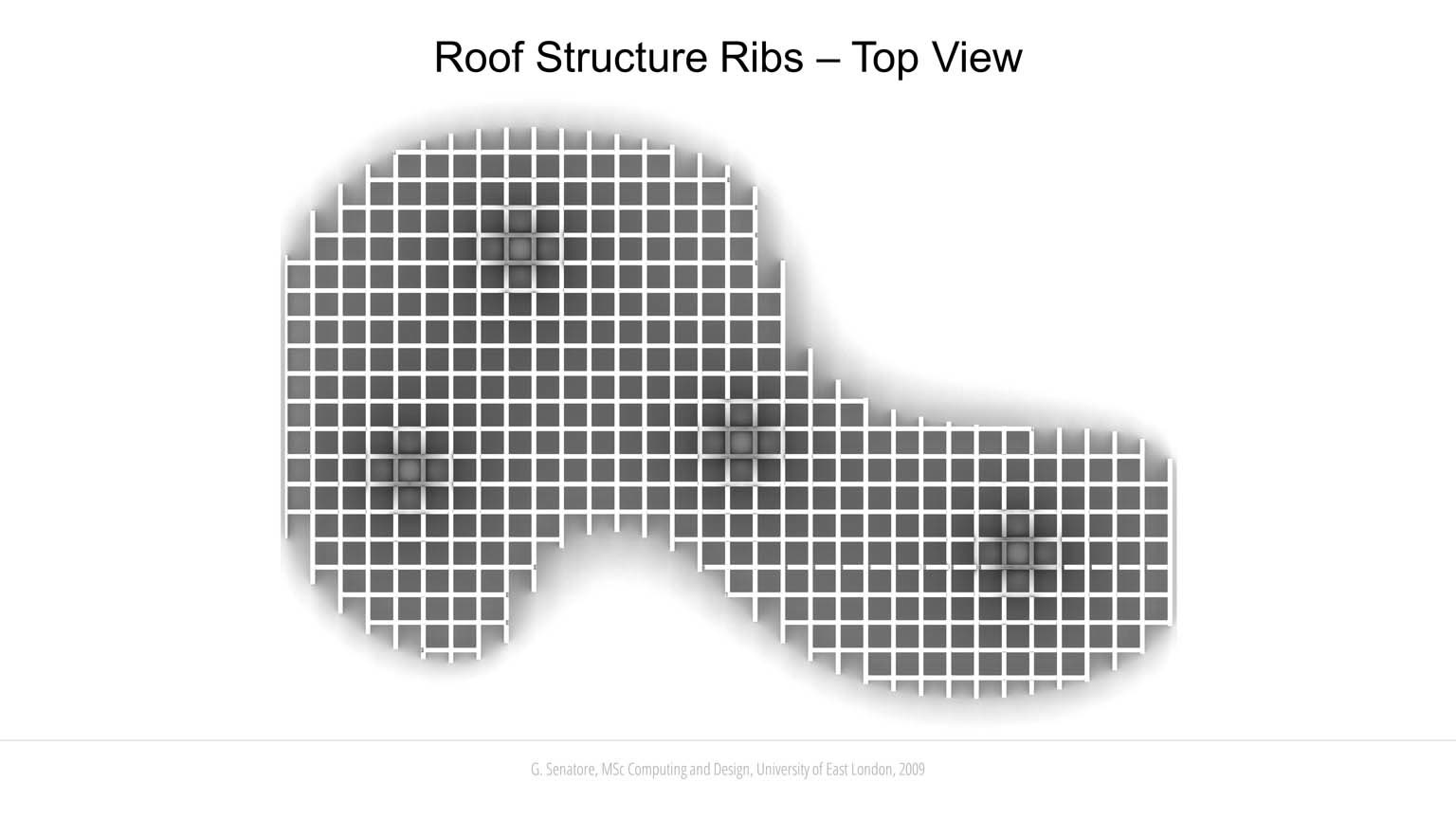
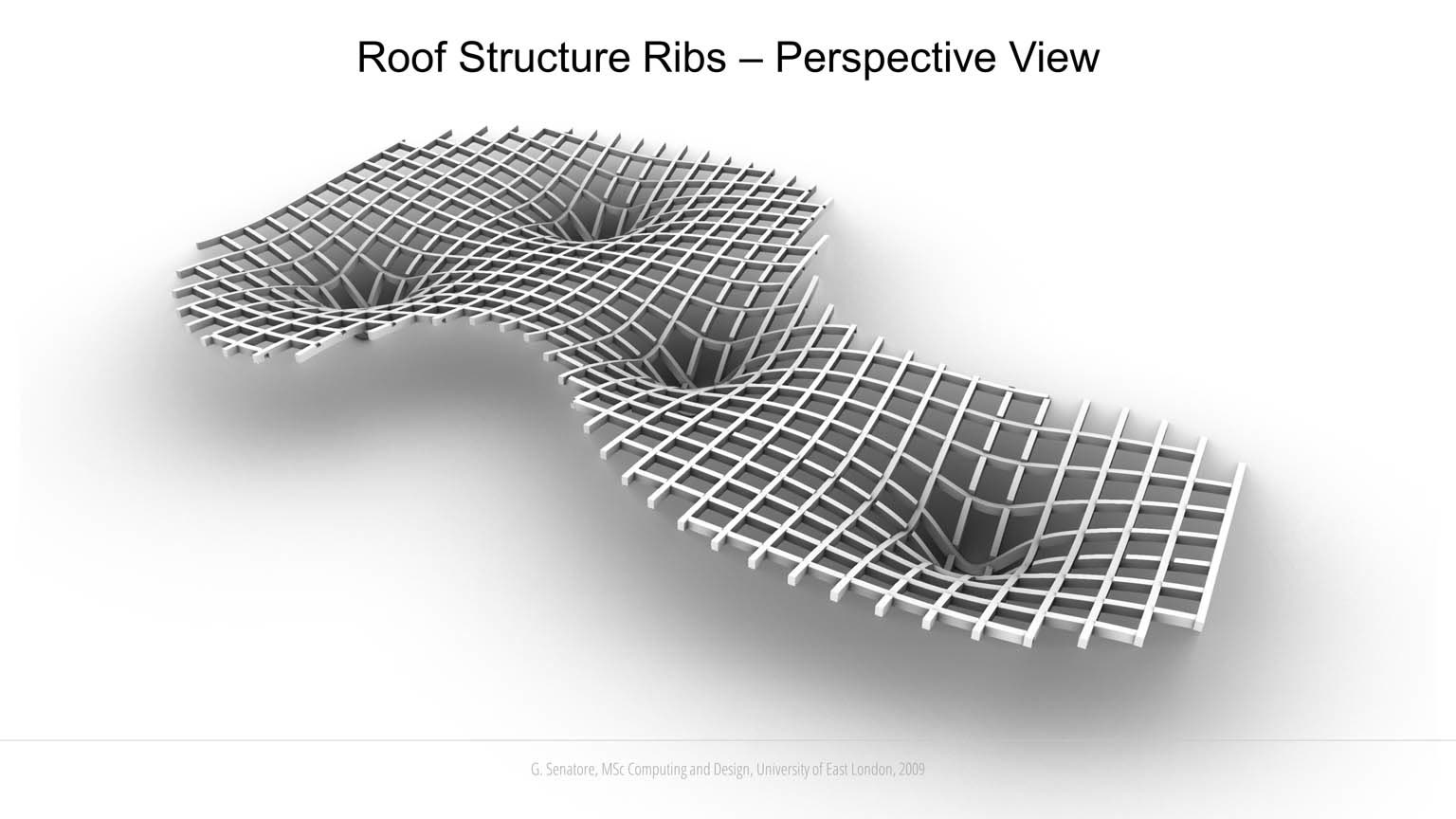
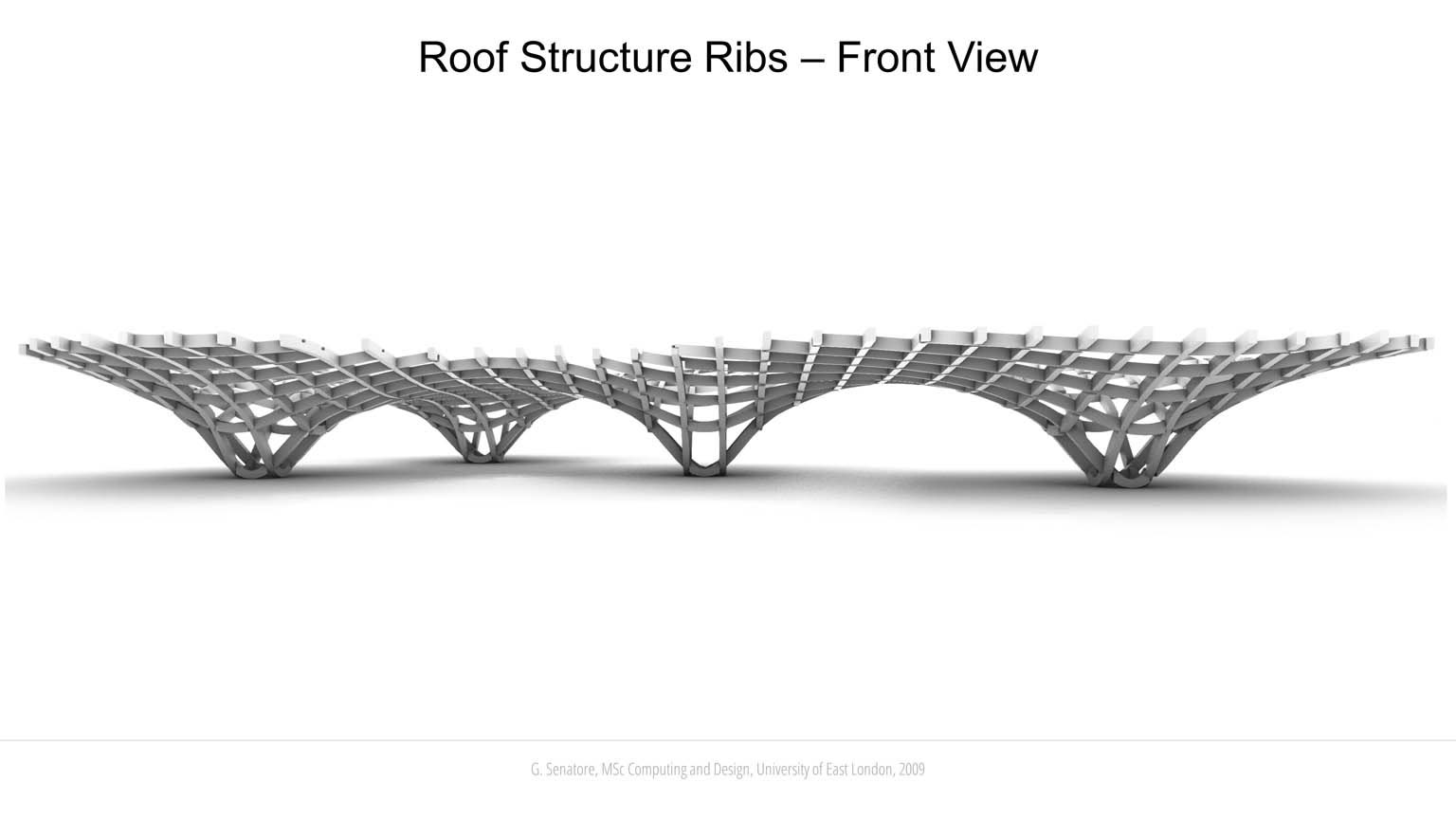
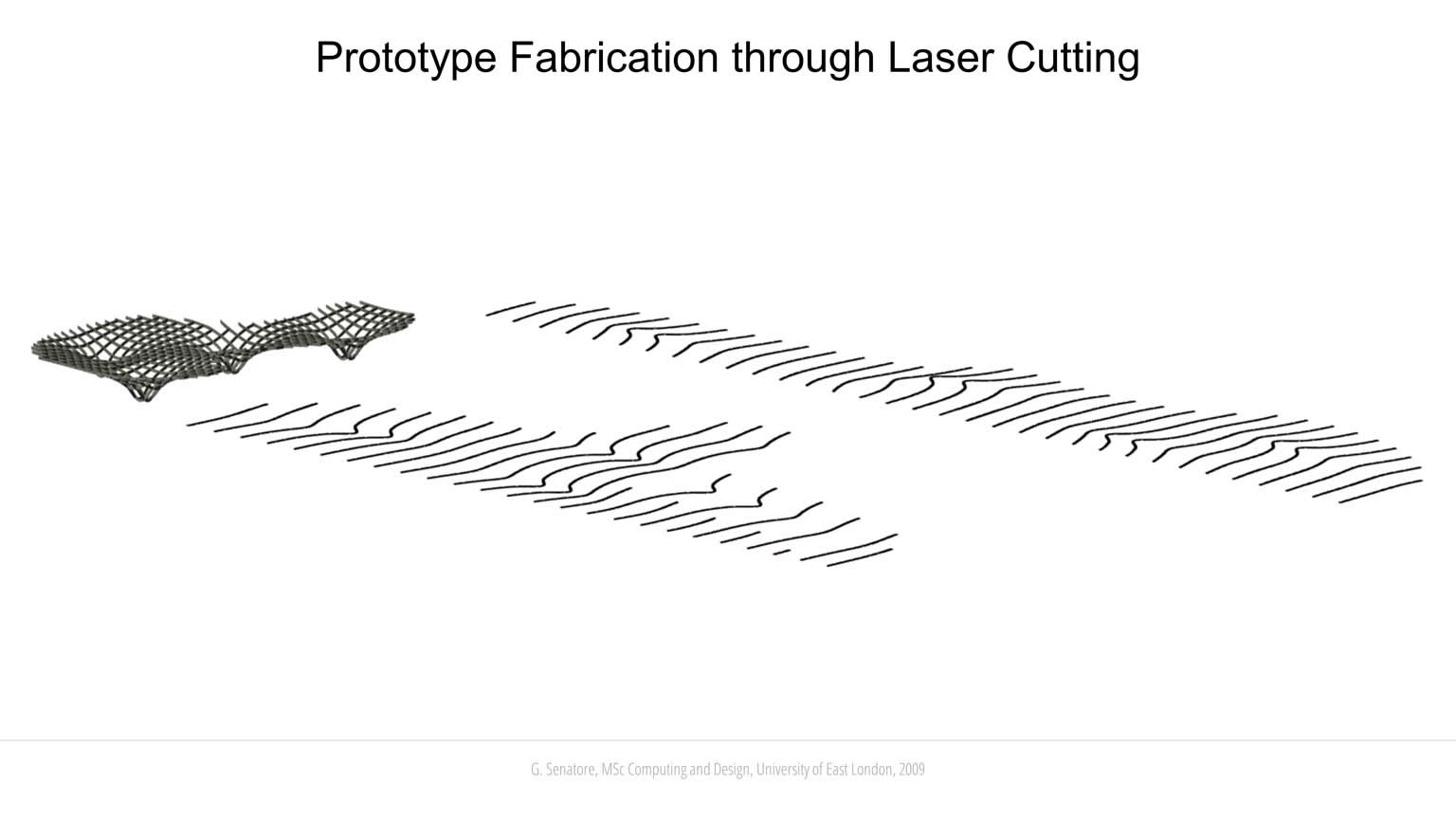
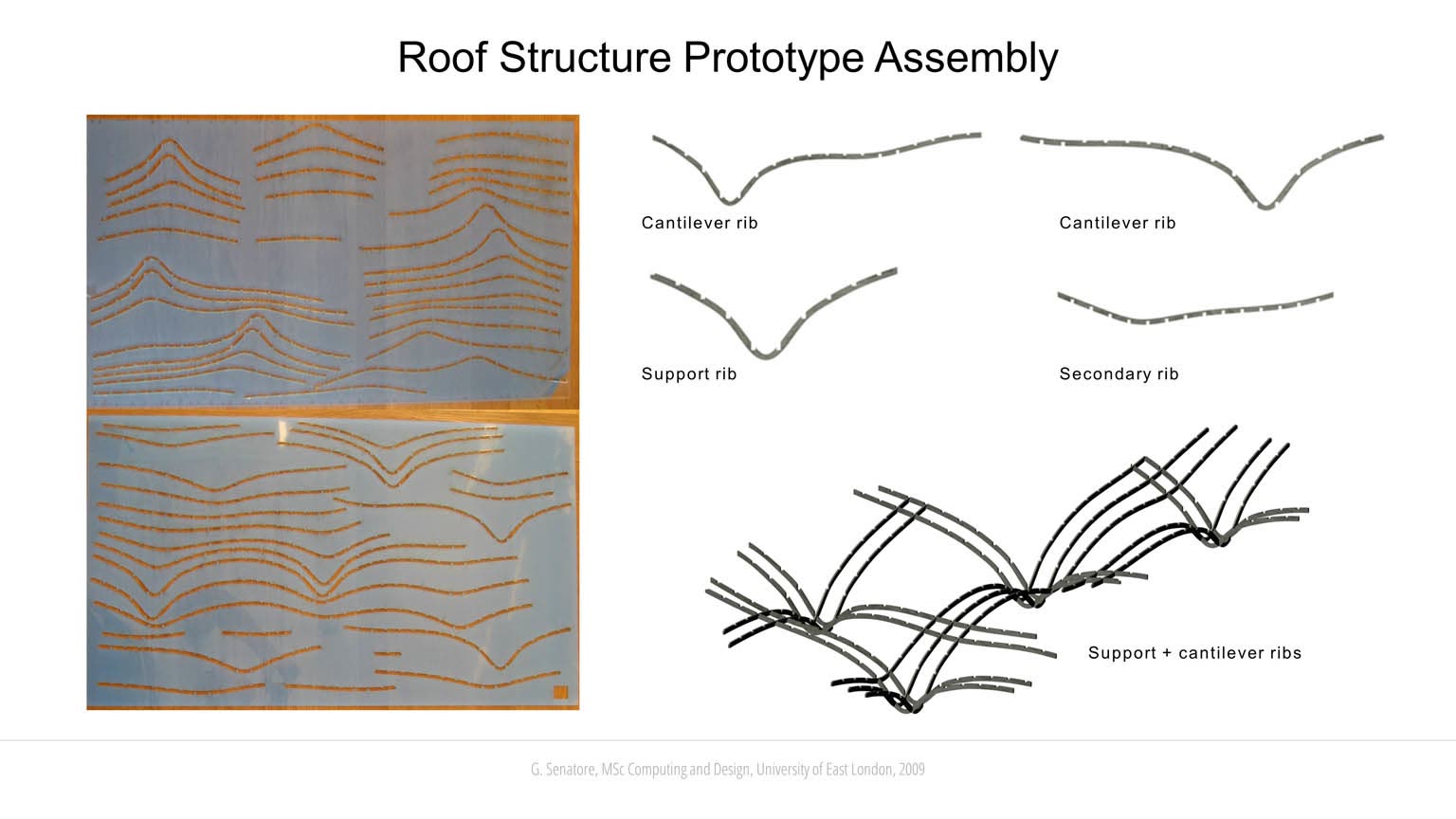
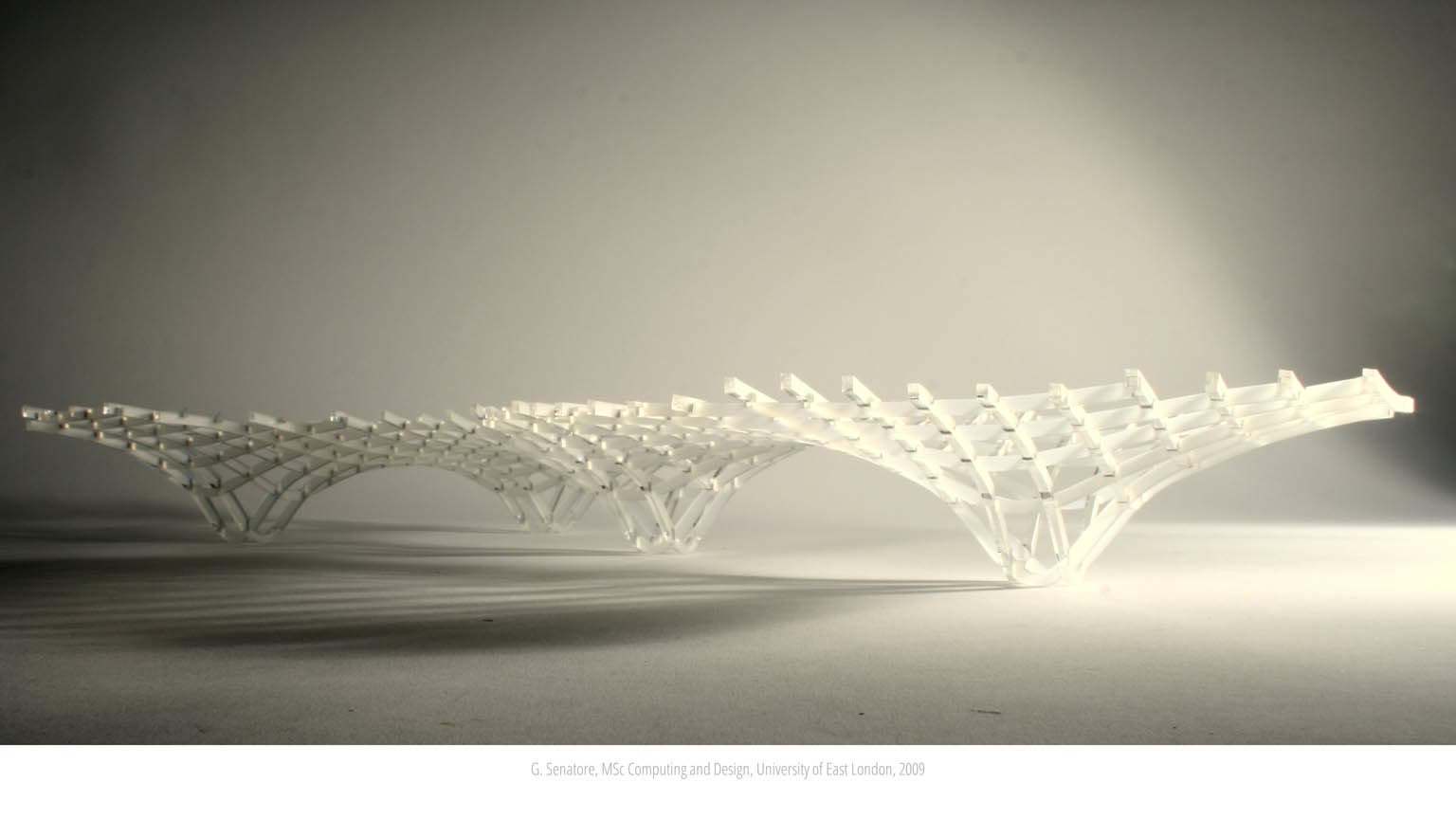
In a 2D application carried out in this work, each cell is surrounded by 8 other cells. The CA system is represented as a grid of nodes that are connected by edges. The intention is to generate a free-form structural grid by specifying the position of the supports and/or the points of maximum elevation. Basic rules are applied to the grid points to average their vertical position according to given external inputs. The input nodes are moved away from their initial position towards the target position (e.g., support location). This information propagates through the grid. Each node iteratively moves to a new position which is the average of its neighbors’ coordinates, until the input nodes reach the target position. The result is a free-form grid whose shape depends on the choice of the input nodes. The grid is formed by interpolating the node positions through splines that follow the grid’s two principal directions (u, v). A separate algorithm takes as input the splines and produces ribs that interlock with each other through a series of groves. Ribs are classified into three types: support, cantilever and secondary. Support ribs meet the ground in at least two points, cantilever ribs in one point and secondary in none. The grooves cut in support ribs are oriented to support all other ribs that interlock with them. The grooves cut in cantilever ribs are oriented to support secondary ribs and change orientation if they interlock with a support rib. A physical model has been successfully fabricated through laser cutting the ribs from an 8 mm thick acrylic sheet.
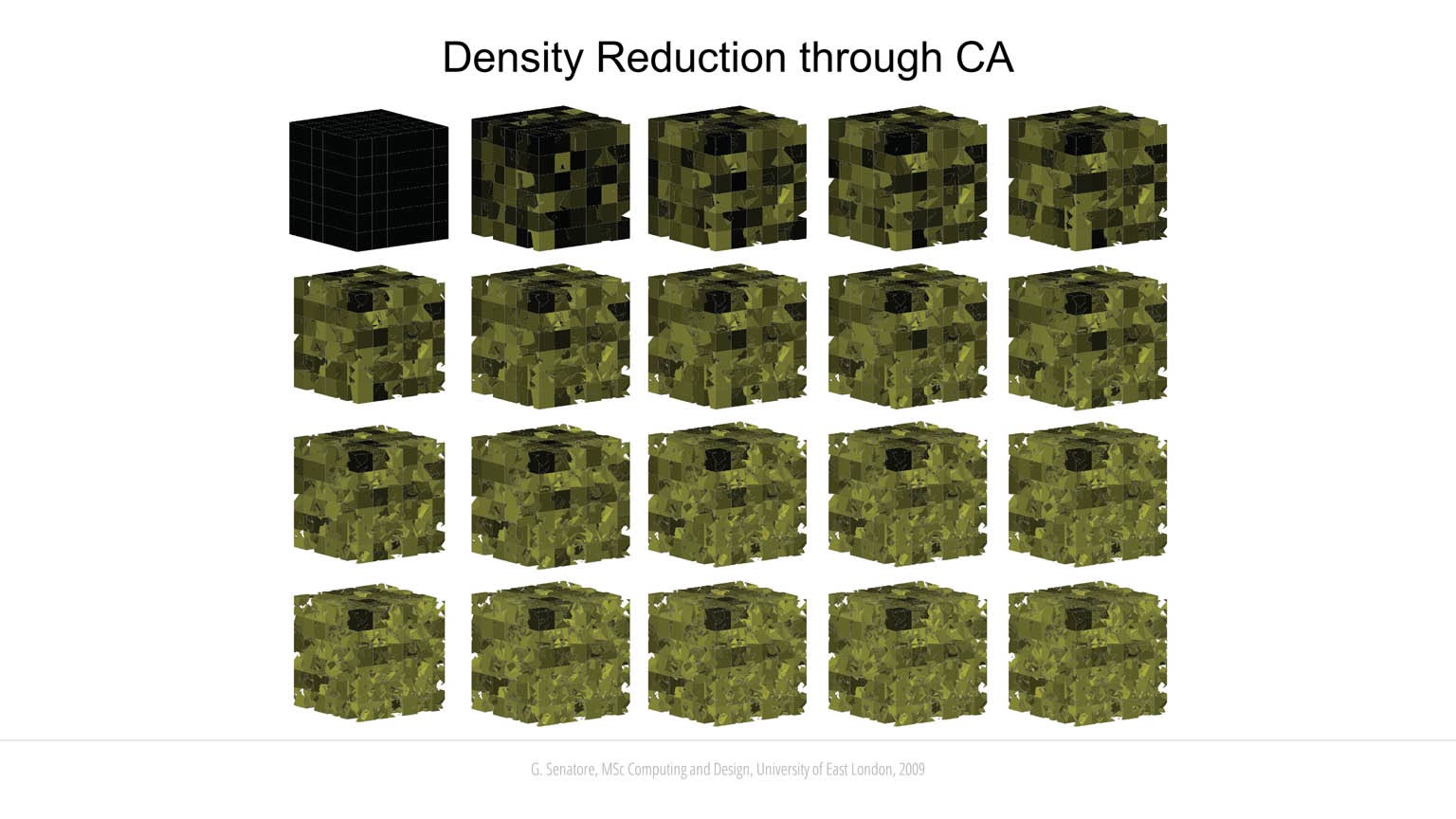
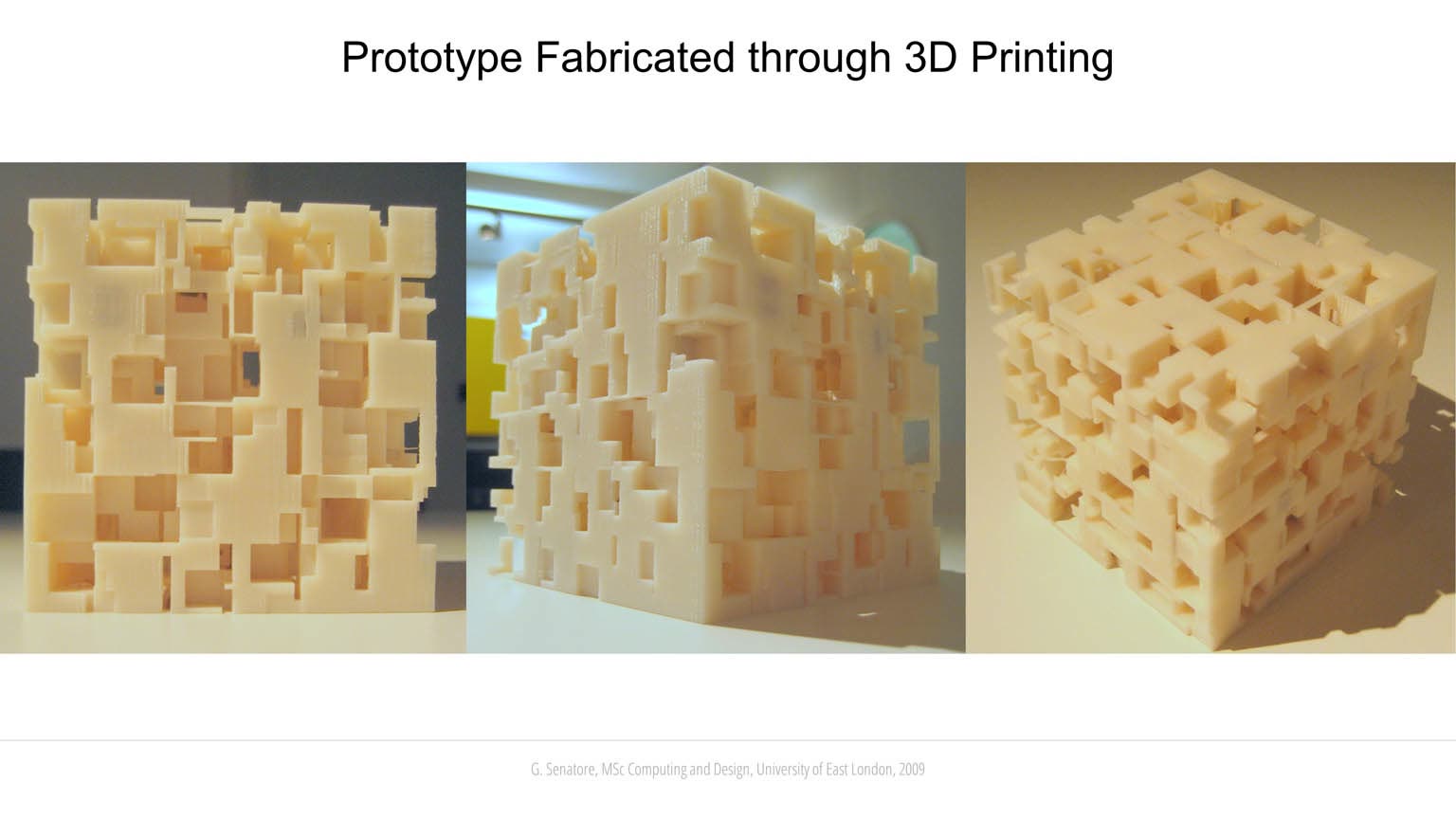
In a 3D application carried out in this work, the cell neighborhood is extended to other 26 cells (Moore neighborhood). The CA system is represented as a 3D grid of cubical cells. This application intends to create a complex 3D artifact by varying the density of the cells. For each cell, the average volume of the neighbors is computed. Subsequently, a cube having the average volume of the neighbors is crated and located randomly within a certain radius from the cell centroid. The cube is then subtracted from all cells it intersects with thus generating voids in different locations of the 3D grid. The color of the cells changes according to the density. The more voids in the cell, the lighter the color. The process repeats for each cell and until a target volume is reached. A physical model has been successfully fabricated through fused deposition modeling.
Acknowledgments
Gennaro Senatore carried out this research for his Master of Science in “Computing and Design” at the University of East London.
Team
Research Lead:
Gennaro Senatore
Advisors:
Paul Coates, Christian Derix | University of East London